Basado en uno que encontré en este foro pero adaptado a mis necesidades y con posibilidad de cargar ficheros de todos los patches.
Invalid download ID.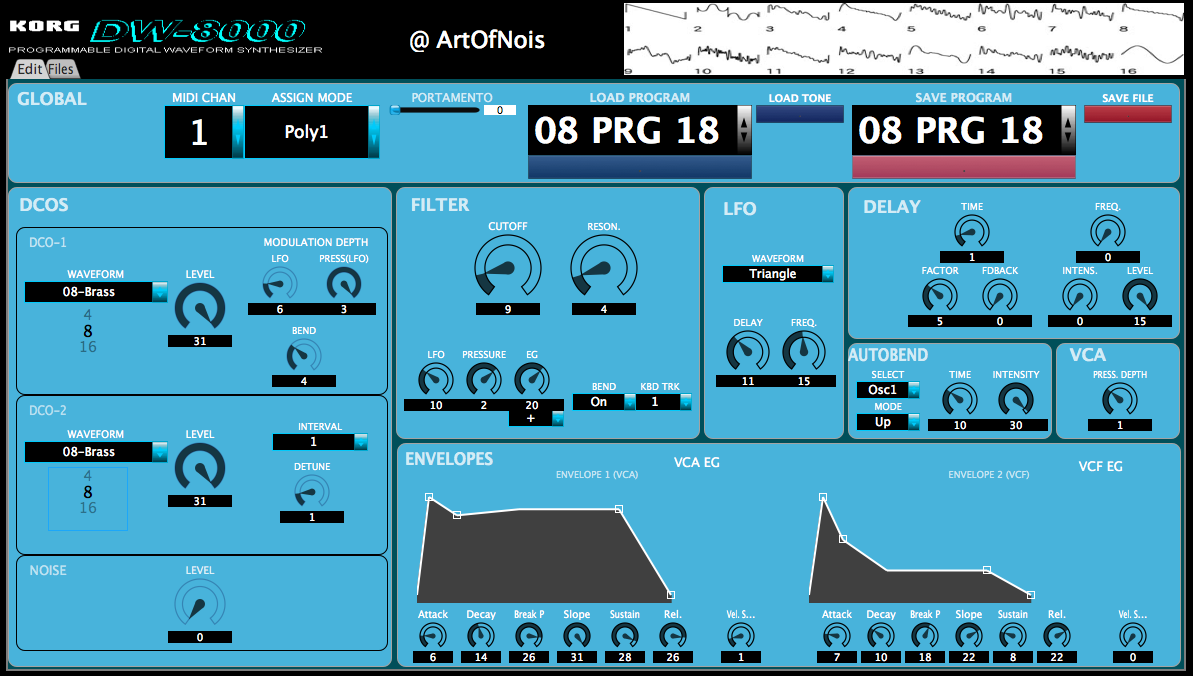

Basado en uno que encontré en este foro pero adaptado a mis necesidades y con posibilidad de cargar ficheros de todos los patches.
Invalid download ID.You must be logged in to post a comment.
no esta la liga de descarga 🙁
reup por favor
Invalid download ID…!!!
ya pero no està..
Can you reup please???